

ULearn4Mobility – Ubiquitous Spatio-Temporal Learning for Future Mobility
- Ansprechperson:
- Förderung:
- Projektbeteiligte:
- Starttermin:
Oktober 2020
- Endtermin:
September 2022
Dieses Projekt befasst sich mit der Entwicklung eines algorithmischen Frameworks für das
Lernen großräumiger raum-zeitlicher Systeme im Zusammenhang mit der zukünftigen
Mobilität. Mit dem Aufbau des 5G-Mobilfunknetzes wird die allgegenwärtige Sensorfusion
zur Abbildung physikalischer Phänomene technologisch möglich. Verbesserte
Rechenleistung ist auf Crowdsensing-Agenten wie Mobiltelefonen, Autos und Zügen
verfügbar. In physikalischen Phänomena kommen häufig Variablen vor, die sowohl
räumlich als auch zeitlich variieren. Beispielswiese kann das Magnetfeld durch die
Bewegung ferromagnetischer Objekte drastisch verändert werden. Die Modellierung von
raum-zeitlichen physikalischen Phänomena ist aufgrund der zugrunde liegenden
komplexen Dynamik nicht trivial. Daher entwickeln wir Lernansätze auf der Basis von
Gaußprozessen (GPs), die ein effizientes raum-zeitliches Lernen in verteilten
Architekturen ermöglichen. Die GPs mit einer verteilten Architektur ermöglichen die
Modellierung physikalischer Phänomena vor Ort an den einzelnen Knoten und die
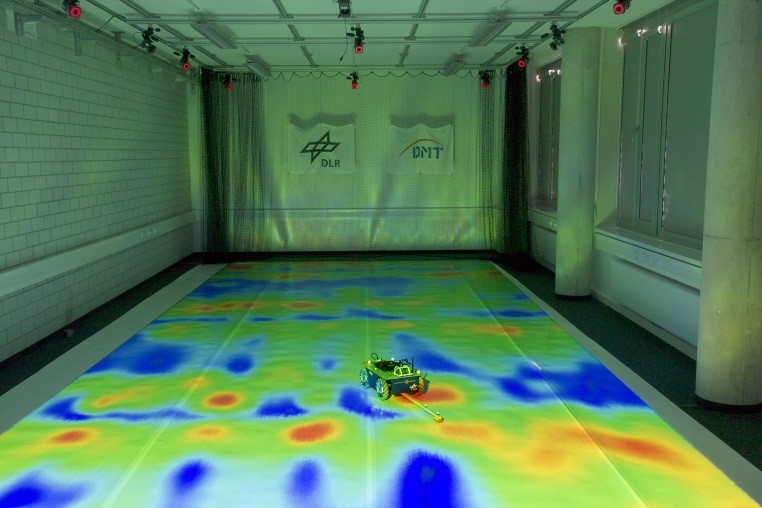
sofortige Inferenz. Die Schlüsselanwendung des Projektes ist das Lernen des
zeitvariablen Magnetfeldes zur Lokalisierung von Agenten mittels Multi-Sensor-Fusion. Ein
GP-basierter Rekonstruktionsansatz erfordert räumliche Koordinaten der Trainings- und
Testdatensätze. Daher koppeln wir die Positionsschätzung eng mit dem raum-zeitlichen
Modell in einem gemeinsamen Lernansatz, auf dessen Grundlage ein simultaner
Positionierungs- und Kartenlern-Algorithmus entwickelt wird. Die darauf aufbauende
mobile Lokalisierung basiert auf Crowdsensing und ist unabhängig von globalen
Navigationssatellitensystemen (GNSS). Es wird daher erwartet, dass sie auch in
Szenarien, in denen GNSS nicht verfügbar ist, robust funktioniert. Das vorgeschlagene
räumlich-zeitliche Lernverfahren vielfältig anwendbar und von generischem Nutzen für
zukünftige Mobilitätsanwendungen und andere damit verbundene technische Probleme.
Lernen großräumiger raum-zeitlicher Systeme im Zusammenhang mit der zukünftigen
Mobilität. Mit dem Aufbau des 5G-Mobilfunknetzes wird die allgegenwärtige Sensorfusion
zur Abbildung physikalischer Phänomene technologisch möglich. Verbesserte
Rechenleistung ist auf Crowdsensing-Agenten wie Mobiltelefonen, Autos und Zügen
verfügbar. In physikalischen Phänomena kommen häufig Variablen vor, die sowohl
räumlich als auch zeitlich variieren. Beispielswiese kann das Magnetfeld durch die
Bewegung ferromagnetischer Objekte drastisch verändert werden. Die Modellierung von
raum-zeitlichen physikalischen Phänomena ist aufgrund der zugrunde liegenden
komplexen Dynamik nicht trivial. Daher entwickeln wir Lernansätze auf der Basis von
Gaußprozessen (GPs), die ein effizientes raum-zeitliches Lernen in verteilten
Architekturen ermöglichen. Die GPs mit einer verteilten Architektur ermöglichen die
Modellierung physikalischer Phänomena vor Ort an den einzelnen Knoten und die
sofortige Inferenz. Die Schlüsselanwendung des Projektes ist das Lernen des
zeitvariablen Magnetfeldes zur Lokalisierung von Agenten mittels Multi-Sensor-Fusion. Ein
GP-basierter Rekonstruktionsansatz erfordert räumliche Koordinaten der Trainings- und
Testdatensätze. Daher koppeln wir die Positionsschätzung eng mit dem raum-zeitlichen
Modell in einem gemeinsamen Lernansatz, auf dessen Grundlage ein simultaner
Positionierungs- und Kartenlern-Algorithmus entwickelt wird. Die darauf aufbauende
mobile Lokalisierung basiert auf Crowdsensing und ist unabhängig von globalen
Navigationssatellitensystemen (GNSS). Es wird daher erwartet, dass sie auch in
Szenarien, in denen GNSS nicht verfügbar ist, robust funktioniert. Das vorgeschlagene
räumlich-zeitliche Lernverfahren vielfältig anwendbar und von generischem Nutzen für
zukünftige Mobilitätsanwendungen und andere damit verbundene technische Probleme.