

Informationen zum Projektpraktikum am ISAS in der aktuellen Situation
Liebe Studierende, liebe Interessenten am ISAS-Projektpraktikum,
das Projektpraktikum wird auch im Sommersemester 2020 angeboten. Aufgrund der aktuellen Situation werden wir dabei auf eine virtuelle Lösung setzen, bis sich die Lage wieder entspannt hat.
Dazu werden wir in diesem Semester einen stärkeren Fokus auf theoretische Arbeiten und Softwareprojekte legen. Bei Hardwareprojekten werden wir durch
- einen Fernzugriff durch eine Anbindung an das Internet,
- aufgezeichnete Daten
- und Emulatoren / Simulatoren
ein Arbeiten ohne eine notwendige physikalische Präsenz der Teilnehmer ermöglichen.
Für die Gruppenbildung, die Teamarbeit, den Austausch mit den Betreuern und für Diskussionen wird ein geeignetes Videokonferenzsystem bereitgestellt. Vorträge werden als Aufzeichnungen eingereicht und allen Teams zur Verfügung gestellt.
Sie können sich darauf verlassen, dass wir alles tun werden, um Ihnen auch in der aktuellen Situation ein spannendes, interessantes und spaßiges Projektpraktikum zu bieten.
Uwe Hanebeck
Praktikum Forschungsprojekt: Anthropomatik praktisch erfahren
Das Ziel des Praktikums Forschungsprojekt: Anthropomatik praktisch erfahren ist es, Studenten die Möglichkeit zu geben, in aktuelle Forschungsgebiete hineinzuschnuppern. Dabei sollen in Gruppen von jeweils zwei bis drei Studenten Soft- und/oder Hardware-Projekte erstellt werden. Die zu bearbeitenden Aufgaben kommen aus den Forschungsbereichen verteilte Messsysteme, Robotik, Mensch-Roboter-Kooperation, Telepräsenz- und Assistenzsysteme. Das Praktikum gibt interessierten Studenten die Möglichkeit, Erfahrungen sowohl im wissenschaftlichen Arbeiten als auch im Projektmanagement zu sammeln.
In dem Praktikum können folgende Fähigkeiten erlernt und vertieft werden:
- Umsetzung von theoretischen Methoden in reale Systeme
- Erstellung von technischen Spezifikationen
- Projekt- und Zeitmanagement
- Entwicklung von Lösungsstrategien im Team
- Präsentation von Zwischen- und Endergebnissen (in Poster- und Folienvorträgen sowie einem Abschlussbericht)
Das Praktikum (4 SWS) besteht aus 2 Lehrveranstaltungen: einem praktischen Teil (mit 2 SWS), welcher die konkrete Implementierung der Aufgabenstellung des Praktikums durch die Studenten beinhaltet, und einem theoretischen Teil (mit 2 SWS). In diesem Teil des Praktikums vermitteln die wissenschaftlichen Mitarbeiter den Studenten die Theorie für das jeweilige Projekt. Außerdem diskutieren die Mitarbeiter mit den Studenten in persönlichen Gesprächen mögliche Lösungen zu Problemen, die bei der Implementierung auftreten. Beide Teile sind nur in Kombination belegbar.
Am Tag der Informatik 2010, 2015 und 2016 wurde das Praktikum Forschungsprojekt "Anthropomatik praktisch erfahren" als bestbeurteiltes Praktikum ausgezeichnet.
Weitere Informationen zum Praktikum Forschungsprojekt: Anthropomatik praktisch erfahren.
Themengebiete
| Projekt | Thema | Betreuer |
|---|---|---|
| 1 |
Machine Learning zur Modellierung des Magnetfelds eines BLDC Motors |
Jana Mayer, Ajit Basarur |
| 2 |
Multilateration and Target Tracking based on Sound Transmissions |
|
| 3 |
|
|
| 4 | ||
| 5 |
Christopher Funk, Susanne Radtke |
|
| 6 |
Real number encoding within an encrypted homomorphic signal framework* |
Marko Ristic |
| 7 |
Pipe Classification with RGBD Data Using Deep Learning Methods* |
, Ajit Basarur |
| 8 | Florian Rosenthal, Benjamin Noack | |
| 9 | * | Kailai Li |
| 10 | Johannes Westermann | |
| 11 | Jana Mayer, , Ajit Basarur | |
| 12 | The COVID-19 Challenge: How to Fight Global Pandemics with Data and AI? | Kailai Li, |
* = wird auf Englisch gehalten!
Projekt 1 - Machine Learning zur Modellierung des Magnetfelds eines BLDC Motors
- Ansprechperson:
Jana Mayer, Ajit Basarur

Einleitung
Bürstenlose Gleichstrommotoren (BLDC-Motoren) sind aufgrund ihrer geringen Kosten und leichter Regelbarkeit weit verbreitet. Viele BLDC-Motoren haben zur Positionsbestimmung des Rotors eingebaute Hall-Sensoren. Diese können die Position bei niedrigen Geschwindigkeiten allerdings nicht in ausreichender Auflösung bestimmen, wodurch eine stotternden Bewegung des Motors verursacht wird. Um eine genauere Auflösung der Position zu erreichen, haben wir ein neues Verfahren entwickelt. Dabei wird das Magnetfeld des Rotors mit einem externen Magnetfeld-Sensor gemessen. Diese Messungen werden verwendet um mit Hilfe eines stochastischen Filters die momentane Position und Geschwindigkeit des Rotors zu schätzen.
Aufgaben
Der Schwerpunkt des Projekts kann entweder auf der Theorie oder der praktischen Anwendung liegen. Von der theoretischen Seite liegt das Hauptaugenmerk auf der Modellierung des Rotor-Magnetfelds. Hier wäre eine Möglichkeit, ein bereits existierendes Gaußprozess-Verfahren zu erweitern. Eine andere Option wäre eine Modellierung basierend auf Bayesian Learning oder RBF Networks zu entwickeln. Auf Anwendungsseite kann des Verfahrens auf Embedded Computer, wie z. B. einem Raspberry Pi, umgesetzt werden. Für beide Optionen wurden bereits Datensätze aufgenommen, die direkt verwendet werden können. Ebenso besteht jederzeit die Möglichkeit an unserem Testaufbau neue Daten zu generieren.
Einleitung
Methoden zur Lokalisierung und Navigation mittels Signalankunftszeiten werden vielfältig eingesetzt, zum Beispiel in der Luftraumüberwachung (Sekundärradar, Mode A/C, ADS-B) oder beim globalen Navigationssatellitensystem (GPS, GLONASS, Galileo, Beidou). Hierbei kommen entweder elektromagnetische oder auch akustische Wellen zum Einsatz. In vorherigen Praktika wurde bereits ein Mikrofonarray basierend auf dem BeagleBoard-X15 gebaut. Mit einem Netzwerk von mehreren dieser Mikrofonarrays sollen nun in praktischen Experimenten Quellenlokalisierung und -tracking durchgeführt werden. Hierbei werden auch neuartige am ISAS entwickelte und teils patentierte Algorithmen zum Einsatz kommen.
Aufgaben
- Dokumentation der vorherigen Praktika lesen
- Linux-Kernel für X15 mit dem Audiotreiber für das Mikrofonboard kompilieren (optional)
- Netzwerk von Mikrofonarrays im ISAS-Holodeck installieren
- Referenz für die wahre Position des Ziels (Lautsprecher)
- Ziel mit Roboterarm der haptischen Schnittstelle im Holodeck bewegen
- optische Lokalisierung mit HTC Vive – Marker
- Ziel soll Sounds emittieren welche optimal zur Detektion von Signalankunftszeiten geeignet sind (Peak-förmiges Signal oder aber weißes Rauschen; muss auf Lautsprecher abgestimmt werden)
- Daten der Mikrofone aufzeichnen und über LAN zum Server senden
- Durchführung von Evaluationen mit den aufgezeichneten Daten unter Verwendung neuartiger Multilaterationsalgorithmen
Vorwissen über Linux wäre vorteilhaft.
Dieses Projekt findet aufgrund fehlenden Gewissheit über die Möglichkeit von Teamarbeit vor Ort nicht statt.
Einleitung
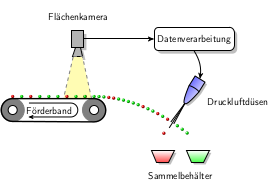
Bei sogenannten optischen Sortierern werden Teilchen auf Basis visueller Eigenschaften klassifiziert. Bei der Anlage, so wie sie vom Fraunhofer IOSB lizenziert wird, werden durch richtiges Timing und gezieltes Aktivieren von Druckluftdüsen eine Klasse der Teilchen „ausgeblasen“, um so die beiden Klassen voneinander zu trennen.
Aktuell wird am ISAS ein kleiner Sortierer in Form eines Rutschensortierers aufgebaut. Im Rahmen dieses Praktikums soll sein neuer Ansatz zur Separation erprobt werden. Hierbei sollen eine Art von "mechanischen Fingern" umgesetzt werden. Es sollen also harte Objekte in den Flugpfad der Teilchen bewegt werden, die dann bestimmte Teilchen ablenken. Da nur bestimmte Teilchen (und nicht alle) abgelenkt werden sollen, müssen schnelle Reaktionszeiten erreicht werden.
Diese Ausschreibung ist besonders für interdisziplinäre Teams, die auch Studierende des Maschinenbaus beinhalten, geeignet.
Aufgaben
Recherche zu Möglichkeiten zur mechanischen Ablenkung von PartikelnPlanung einer Hardwareumsetzung inklusive Festlegung der BauteileUmsetzung in HardwareUmsetzung einer einfachen Möglichkeit zur Ansteuerung
Einleitung
Bei optischen Bandsortierern werden Teilchen wie Recyclingmaterial oder Lebensmittel auf Basis visueller Eigenschaften getrennt, indem die Teilchen einer Klasse durch richtiges Timing und gezieltes Öffnen von Druckluftventilen „ausgeblasen“ werden. Hierzu ist es notwendig, die Position und den Zeitpunkt der Teilchen am Düsenbalken vorherzusagen (zu prädizieren).
Um akkurate Prädiktionen zu ermöglichen, haben wir kürzlich vorgeschlagen, die Teilchen auf dem Band mit einer Flächenkamera zu beobachten und so deren Trajektorien mittels Multitarget-Tracking-Verfahren zu rekonstruieren. Hierzu wird aktuell ein Kalman-Filter-basierter Ansatz verwendet. Dessen Genauigkeit ist stark von den gewählten Hyperparametern, wie dem eingesetzten Bewegungsmodell sowie dem Mess- und Prozessrauschen, abhängig. Diese wiederum hängen u. A. vom eingesetzten Schüttgut ab. In dieser Arbeit sollen Methoden zur automatischen Einstellung der Hyperparameter des Kalman-Filters z. B. mittels adaptiver oder lernender Verfahren untersucht werden. Ziel ist eine automatische Anpassung der Hyperparameter zur Laufzeit.
Aufgaben
- Einarbeitung in das bestehende Multitarget-Tracking-System
- Recherche zum Stand der Technik zu adaptiven/lernenden Verfahren zur Einstellung der Hyperparameter des Filters
- Implementierung favorisierter Verfahren
- Evaluation der Verfahrens gegen die bisherige, manuell getunte Lösung und Untersuchung der Anpassungsfähigkeit an Änderungen des Schüttguts und der Schüttgutzusammensetzung
Voraussetzungen
Grundkenntnisse in Python und Matlab
Projekt 5 - Simulationsumgebung für Indoor-Lokalisierung
- Ansprechperson:
Christopher Funk, Susanne Radtke
Einleitung
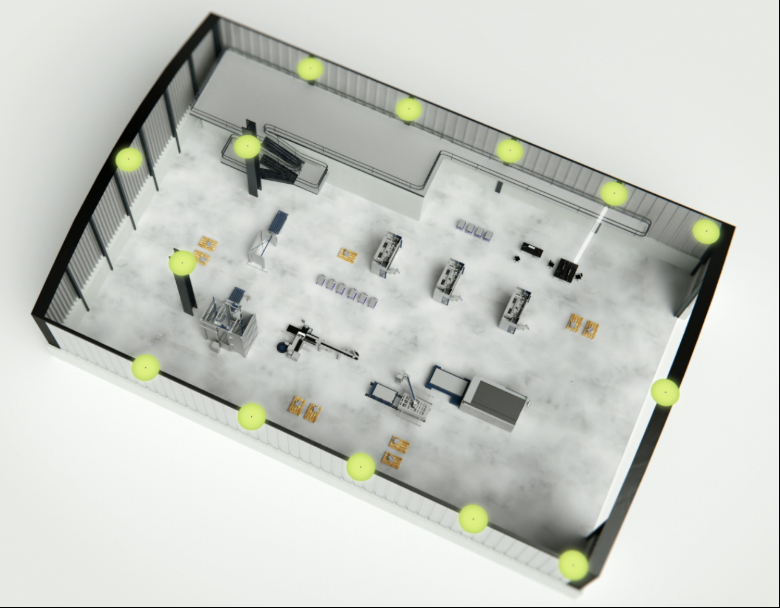
Für die robotische Automatisierung im industriellen Umfeld werden Lokalisierungsmethoden benötigt, die genaue und robuste Positionsschätzungen, z. B. in einer Fabrikhalle, liefern können. Da GPS innerhalb von Gebäuden nicht verfügbar ist, werden alternative Technologien auf Basis von Ultrabreitbandfunk (UWB) eingesetzt. Die Lokalisierungsgenauigkeit wird jedoch durch die Umgebung, d. h. durch Wände, Personen und Gegenstände beeinträchtigt.
Ziel des Praktikums ist es eine Simulationsumgebung für UWB-Lokalisierungssysteme zu erstellen, mit deren Hilfe die Effekte der Umgebung auf die Lokalisierungsgenauigkeit bestimmt werden können. Das so gewonnene Wissen kann dann zur Optimierung eines UWB-Lokalisierungssystems genutzt werden.
Aufgaben
- Erstellen einer GUI zur einfachen Erzeugung von 2D-Umgebungskarten
- Raytracing-basierte Simulation von Abschattungen durch die Umgebung
- Umsetzung eines probabilistischen Modells für UWB-Distanzmessungen
Projekt 6 - Real number encoding within an encrypted homomorphic signal framework (wird auf Englisch gehalten!)
- Ansprechperson:
Marko Ristic
Introduction
With the rise of signal processing in distributed and cloud focused networks, the need for security between participating parties has become more apparent. Homomorphic encryption schemes have in recent years been developed and applied to various signal processing application, enabling the secure computation of some or all parts of particular processing tasks. Advances in Fully Homomorphic Encryption (FHE) schemes are leading to comparable run times with more powerful possibilities than partially homomorphic methods. These encryption schemes are primarily designed to work with integers, and efficient conversion between real number representations and integers over cyclic groups is an important step in making homomorphic signal processing viable.
Tasks
- Find and assess current FHE libraries
- Consider real number encodings within or external to existing FHE libraries
- Design a general many-purpose signal processing simulation framework
- Implement framework incorporating suitable encoding and FHE libraries (preferably in C or Python)
- Demonstrate usability of framework with a simple fully homomorphic filtering simulation
Programming or software design experience may be beneficial.
Projekt 7 - Pipe Classification with RGBD Data using Deep Learning Methods (wird auf Englisch gehalten!)
- Ansprechperson:
, Ajit Basarur
Introduction
Industry 4.0 has kickstarted interest in the digitalization of processes that were previously done by hand. One of these processes is the automatization of quality controls, especially in industrial manufacturing. As part of a cooperation with PFW Aerospace, the objective of this practical course is the classification of industrial pipes for airplanes based on camera data. This task is not straightforward, in particular because these pipes can be bent in arbitrary three-dimensional directions, and thus, traditional color data (RGB) is usually insufficient. Instead, we are interested in new approaches that incorporate depth information from sensors such as the Kinect 2. This raises new challenges for deep learning methods, which generally deal with flat images instead of point clouds.
Tasks
- Research state-of-the-art methods for classification methods with 3D point clouds
- Make 3D captures of the parts using a Kinect 2, and process the data as necessary
- Implement a classifier using a neural network
Projekt 8 - WLAN-basierte Lokalisierung und Lageregelung einer mobilen Roboterplattform
- Ansprechperson:
Florian Rosenthal, Benjamin Noack
Einleitung
bitte hier klicken.
Am ISAS wurde ein Prototyp eines mobiles Roboter entworfen, welcher über vier unabhängig angetriebene Radeinheiten verfügt, die eine omnidirektionale Bewegung ermöglichen. Damit sich der Roboter zielgerichtet bewegen kann (z. B. einen bestimmten Punkt anfahren oder einem gegebenen Pfad folgen kann), muss er schritthaltend seine Lage (d. h. Position und Orientierung im Raum) bestimmen und ggf. anpassen. Typischerweise implementiert man die dazu genutzten Algorithmen zur Verarbeitung der Sensordaten (z. B. Kalman-Filter) sowie zur Lagerelegung (z. B. auf Basis von modellprädiktiven Ansätzen) direkt auf dem Roboter.
In einem vorigen Projekt wurde eine alternative Lösung umgesetzt, bei der der Roboter drahtlos über eine WLAN-Verbindung mit einem Computer kommuniziert, auf den die Algorithmen zur Lokalisierung und Lagereglung ausgelagert worden sind. Während man damit auf der einen Seiten die Ressourcenbeschränkungen der Mikrocontroller auf dem Roboter überwindet, muss man andererseits aber die Auswirkungen von veränderlicher Bandbreite sowie Paketverlusten in der Kommunikation auf die Qualität von Lokalisierung und Regelung beachten.
Im Rahmen dieses Praktikums soll eine alternative Lösung umgesetzt werde, in der der Roboter drahtlos über eine WLAN-Verbindung mit einem Computer kommuniziert, der die Lokalisierung und Regelung zur Pfadplanung übernimmt.
Ein existierender Ansatz zur netzwerkbasierten Regelung und Lokalisierung soll erweitert werden. Hierbei sollen insbesondere Auswirkungen von veränderlicher Bandbreite sowie Latenzen berücksichtigt werden. Weiterhin sollen für die Lageschätzung ereignisbasierte Ansätze untersucht werden.
Aufgaben
- Einarbeiten in das existierende System (Hardware und Software),
- Implementieren eines alternativen Verfahrens zur Regelung über ein Kommunikationsnetzwerk,
- Implementieren von ereignisbasierten Schätzverfahren zur Lokalisierung,
- Evaluieren der Qualität von Regelung und Lokalisierung unter verschiedenen Netzwerkbedingungen mit einfachen Trajektorien wie Kreis oder Quadrat.
Interesse an Robotik sowie Vorkenntnisse in Lokalisierungsverfahren sowie Regelungstechnik sind vorteilhaft.
Min. 2 Studenten
Projekt 9 - Mapping-Enhanced UWB Localization (wird auf Englisch gehalten!)
- Ansprechperson:
Kailai Li
Introduction
Ultra-wideband (UWB) sensors can provide localization accuracy up to the level of centimeter to decimeter and are widely deployed in many industrial production scenarios. However, the localization performance can be considerably affected due to the complexity of the surroundings, e.g., reflections, interference of ferromagnetic material, etc. Therefore, preknowledge about mapping is supposed to be enhance the quality of UWB-based localization to a large extent.
In this project, a novel mapping-based UWB localization system is to be established based on state-of-the-art probabilistic machine learning approaches. More specifically, the project is formulated into the following work packages.
Tasks
- Investigation of an efficient 3D mapping approach for representing the geometric information of the surroundings for UWB-measurement prediction.
- Integration of the mapping-based prediction block into a probabilistic inference framework for robust position estimation.
- Evaluation w.r.t. localization robustness and accuracy based on simulation and real-world experiments.
Students with strong interest in probabilistic machine learning are encouraged to join. A background computer vision/graphics is preferable but not a must.
Einleitung
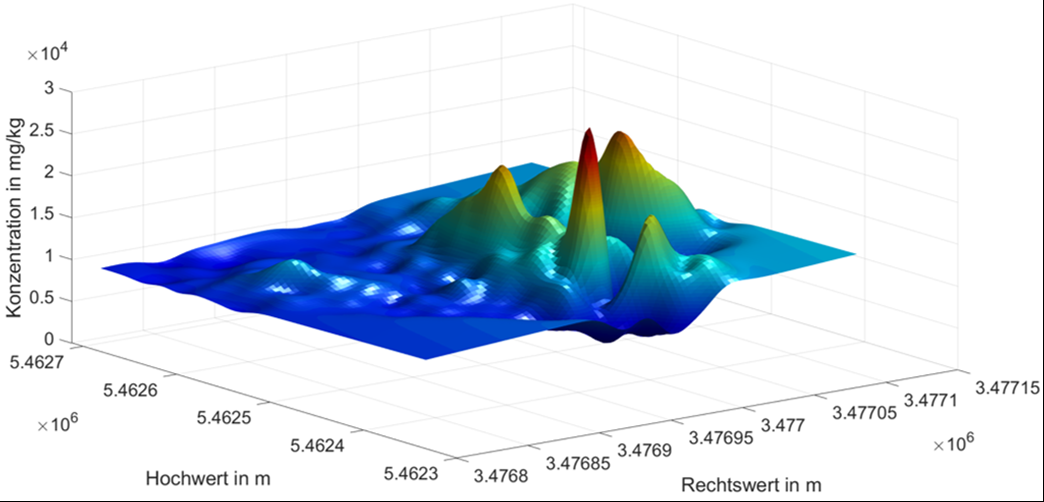
Bei der Erkundung neuer Areale spielt die Modellierung der Umgebung eine entscheidende Rolle. Egal, ob das Relief, Stoffkonzentrationen, Temperaturwerte, Strahlungsintensitäten oder andere Größen gemessen werden, gilt es den Ressourcenbedarf für die Messwertaufnahme zu minimieren. Typische Anforderungen sind die Minimierung des Energiebedarfs und Zeitaufwands, wozu die Fahrwege zu den Messstellen, die Anzahl der Messungen, etc. gehören. Zudem müssen Beschränkungen wie unerreichbare Stellen/Bereiche beachtet werden. Die Auswahl und Gewichtung der Anforderungen hängt dabei von der konkreten Explorationsaufgabe und der dafür verwendeten Sensorik ab. Falls Vorwissen über das zu betrachtende Phänomen vorliegt, kann dies ebenfalls in die Explorationsstrategie einfließen.
In diesem Praktikum sollen Explorationsstrategien für die Erkundung eines dreidimensional verteilten Phänomens erarbeitet und implementiert werden. Dazu können sowohl Verfahren aus der Optimierungstheorie, statistische Verfahren als auch Machine Learning Verfahren wie Reinforcement Learning evaluiert werden.
Aufgaben
- Einarbeitung und Recherche
- Auswahl/Entwicklung geeigneter Verfahren
- Implementation
- Evaluation

Einleitung
Die jüngsten Erfolge künstlicher Intelligenz (KI) sind vor allem auf die zunehmende Verfügbarkeit von Rechenleistung und Speicherkapazität zurückzuführen. Für viele kleinere Unternehmen rentiert sich eine eigene High-End-Infrastruktur für KI jedoch nicht, und aufgrund datenschutzrechtlicher Vorgaben kommen Clouds externer Anbieter oft ebenfalls nicht infrage.
In unserem Projekt soll KI stattdessen auf Minimal-Hardware realisiert werden. Eine nachrüstbare Sensor-Box überwacht mit Gyroskopen sowie Magnetfeld- und Beschleunigungssensoren (die ganz ähnlich auch in Smartphones verbaut sind) den Zustand eines Elektromotors und seiner Kugellager. Mit diesen Daten soll nun ressourcenschonend Predictive Maintenance direkt in der Sensor-Box durchgeführt werden.
Die Sensor-Box (endiio Retrofit Box) wurde an einem Elektromotor (230V, 3000RPM) angebracht. Messreihen mit verschiedenen Fehlerzuständen (Motorschäden, Unwuchten) wurden bereits aufgezeichnet. Erwartungsgemäß sind die mechanischen Daten annähernd periodisch mit der Umdrehungsgeschwindigkeit des Motors. Die genaue "Wellenform" bzw. die Gewichtung der Harmonischen in der Fourierreihe unterscheiden sich dabei je nach Fehlerzustand.
Aufgaben
- Bestimmung der genauen Umdrehungsgeschwindigkeit
- Bestimmung der Fourierkoeffizienten
- Klassifikation des Fehlerzustands anhand der Fourierkoeffizienten
- Überblick über Klassifikationsverfahren
- Berücksichtigung des Rechenaufwands zum Training
- Vergleich verschiedener Klassifikatoren
- Erkennen eines bisher unbekannten Fehlerzustands (Unsupervised Learning)
Anrechenbarkeit
Vertiefungsgebiete
-
Theoretische Grundlagen
-
Robotik und Automation
-
Anthropomatik und Kognitive Systeme
Master- und Bachelorstudiengang
Die erbrachte Leistung wird mit 8 LP angerechnet.
Seminar zum Praktikum
Optional kann im Rahmen des Praktikums zusätzlich ein Seminarschein erworben werden.
Anmeldung
- Die Anmeldung ist bis Dienstag, 28.4.2020, 10 Uhr möglich und erfolgt per Formular am Ende dieser Seite.
-
Nach Ablauf dieser Frist werden die verfügbaren Plätze unter allen Anmeldungen vergeben.
- Weitere Details zum Kurs : ILIAS-KURS-LINK.
Koordination: (bis Mai 2020) / (ab Juni 2020)
Termin und Ort
Die Einführungsveranstaltung mit allen Teilnehmern findet als Online-Diskussion mit MS Teams am Mittwoch, 29.04.2020 um 14 Uhr statt.
Weitere Termine sind:
- Erste Präsentation (Projektvorstellung): Freitag, 08.05.2020, 14 Uhr
- Zwischenpräsentation: Freitag, 19.06.2020, 14 Uhr
- Abschlusspräsentation: Freitag, 24.07.2020, 14 Uhr
Hierzu wird ebenfalls MS Teams verwendet.