Themengebiete SS26
Einleitung:
Moderne Telepräsenzsysteme nutzen für die visuelle Darstellung Head-Mounted-Displays (HMD) aka. VR-Brillen. Um sich immersive durch virtuelle Welten bewegen zu können, muss sich dazu das HMD im physischen Raum lokalisieren und die Position im virtuellen Raum entsprechend darstellen. Dafür ist in handelsüblichen HMDs ein Inside-Out-Tracking implementiert, welches sich allein anhand interner Sensorik im Raum lokalisiert. Aufbauend auf diesem Tracking, beschäftigen sich aktuelle Arbeiten mit Funktionen wie bspw. Intentionserkennung und Human-Robot-Cooperation, welche eine verlässliche Lokalisierung bei einer sich verändernden Umgebung voraussetzen. Um dies zu ermöglichen ist das Ziel dieses Praktikums die Evaluierung des geräteinternen Trackings ggü. einem Outside-in Tracking. Basierend auf den Ergebnissen sollen Optimierungen des Trackings entwickelt und getestet werden.
Aufgaben:
- Einarbeitung in Hardwarekomponenten und Methodik
- Entwicklung, Durchführung und Auswertung von Evaluationen zur Tracking-Robustheit in verschiedenen Szenarien
- Entwicklung, Implementation und Evaluation von optimierten Trackingverfahren für verfügbare HMDs/li>
Voraussetzungen:
- Kenntnisse in ROS, Python und C# (empfehlenswert)
- Grundkenntnisse in Unity (nicht zwingend notwendig)
- Unabhängiges Lernen und Arbeiten sowie Teamarbeit
Literatur:
[1] M. Fennel et al.: HapticGiant: A Novel Very Large Kinesthetic Haptic Interface with Hierarchical Force Control [2] Faion, F., Zea, A., Noack, B., Steinbring, J., & Hanebeck, U. D. (2016). Camera-and IMU-based pose tracking for augmented reality. In 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI)

Einleitung:
There are many creative platforms and propulsion concepts in mobile robotics, and we want to add one more. With a focus on usefulness as an academic testbed for state estimation and control, we developed the concept of a spherical robot that is propelled by outward moving linear actuators. This poses a challenge to controlling and steering the robot that needs to be solved by smart algorithms. First, a proof of concept has to be generated, and then the design phase can start.
Aufgaben:
- Design simplified and prototype versions of the robot using CAD software
- Simulate the dynamic behavior with, e.g., MuJoCo and custom models
- Plan the system architecture and start prototyping
Voraussetzungen:
- High Interest in Mechatronic Systems and the simulation of them
- Knowledge in computer aided design (mechanical or electrical)
- Basic Skills in Control Theory are an advantage
Einleitung:
Am Institut wurde bereits eine Fahrzeugplattform mit guten Drift-Eigenschaften in ein vom PC aus via Bluetooth fernsteuerbares Auto modifiziert, welches von einem Kinect-System lokalisiert wird. Nun soll mit Hilfe etwa eines Reinforcement Learning Ansatzes diesem Fahrzeug das Driften beigebracht werden. Dabei muss berücksichtigt werden, dass das Fahrzeug etwa während des Lernens immer rechtzeitig abgebremst werden muss, wenn der aktuelle Vorgang zu einem Kontrollverlust mit Kollision führen könnte. Hierfür kommen z.B. dedizierte Bremsen infrage. Schließlich soll ausgehend von langsamem Fahren immer schnelleres Fahren exploriert werden, bis es die Fähigkeit des Driftens erlernt.
Aufgaben:
- Inbetriebnahme der vorhandene Plattform
- Lernen des normalen Folgens einer vorgegebenen Kurve
- Optimierungen: Notbremse, einheitliche Stromversorgung, Platine statt Breadbord
- Schnelleres Fahren sicher umsetzen
- Entwickeln eines Rewards, der Drift-Fahrzustände belohnt
- Lernen von Driften
Voraussetzungen:
- Erfahrung mit Programmieren
- bevorzugt: Erfahrung mit Reinforcement Learning

Projekt 4 - Cooperative Multi-agent Reinforcement Learning für einen Multi-Aktoren-Array Sortierers
- Ansprechperson:
Einleitung:
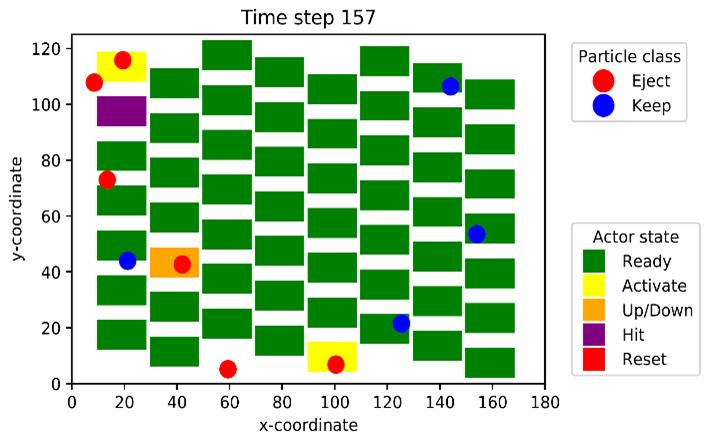
Im kooperativen Multi-Agenten Reinforcement Learning (MARL) versucht eine Vielzahl sogenannter Agenten – beispielsweise Roboter – durch Interaktion mit ihrer Umgebung gemeinsam ein Ziel zu erreichen, das für einen einzelnen Agenten in der Regel nicht erreichbar wäre. Im Rahmen dieses Praktikums soll die Steuerung eines sogenannten Multi-Aktoren-Array Sortierers mittels MARL erlernt werden. Dieser Sortierer besteht aus mehreren Reihen mechanischer Aktoren, wobei jeder Aktor als eigenständiger Agent betrachtet werden kann. Dadurch ergeben sich zahlreiche Möglichkeiten zur Trennung von Partikeln. Ziel ist es, eine Konfiguration zu identifizieren, die hinsichtlich der Sortiergenauigkeit – gemessen an der Anzahl korrekt ausgeschleuster und korrekt nicht-ausgeschleuster Partikel – optimal ist.
Am ISAS existiert hierzu bereits ein bestehendes MARL-Modell inklusive Simulationsumgebung des Multi-Aktoren-Array Sortierers welches nun weiterentwickelt werden soll. Anschließend soll das gelernte Modell auf einen bestehenden Prototypen (Video) angewandt und iterativ verbessert werden.
Aufgaben:
- Einarbeitung in MARL und die bereits vorhandene Software
- Umsetzung eines kontinuierlichen – anstatt wie bisher diskreten – Actionspaces zur genaueren Ansteuerung der Aktoren
- Ggf. Anpassung des MARL-Algorithmus und des zugehörigen Softwarepakets und Lernen der Modelle
- Übertrag der gelernten Modelle auf den Realsortierer
- Iterative Verbesserung der Modelle
Voraussetzungen:
- Grundkenntnisse in Python
- Grundkenntnisse in Reinforcement Learning
Projekt 5 - Labyrinth Geschicklichkeitsspiel mit modellbasiertem Deep Reinforcement Learning
- Ansprechperson:
Einleitung:
Deep Reinforcement Learning ermöglicht das kontinuierliche, automatische Lernen eines Reglers für beliebige Aufgaben, so auch ein Labyrinth-Geschicklichkeitsspiel. Ein solches Echtzeitsystem wurde von einer Gruppe an der ETH Zürich entworfen und im letzten Praktikum am ISAS nachgebaut. Nun soll die Problemstellung verallgemeinert werden. Bisher hat die KI „overfitted“ auf die spezielle Labyrinthstruktur. Das Ziel ist nun das Folgen einer beliebigen Linie – erstmal ohne verkomplizierende Bande und Löcher, aber dafür so, dass das System ohne erneutes Trainieren beliebigen Linien folgen kann. Anschließend soll dieses Problem auch mit weiteren Regelalgorithmen gelöst werden, darunter mit neuartigen, am ISAS entwickelten, stochastischen Reglern.
Aufgaben:
- Inbetriebnahme des existierenden Modells und Einarbeitung
- Trainieren auf Folgen einer beliebigen Linie
- Erweiterung auf alternative stochastische Regelalgorithmen
- Robustheit des Aufbaus verbessern zur Eignung als Demonstrator
Voraussetzungen:
- Erfahrung mit Programmieren
- Interesse an Regelung und Reinforcement Learning
- bevorzugt: Erfahrung mit ROS
Literatur:
- https://www.cyberrunner.ai/
- Thomas Bi, Raffaello D’Andrea, Sample-Efficient Learning to Solve a Real-World Labyrinth Game Using Data-Augmented Model-Based Reinforcement Learning

Einleitung:
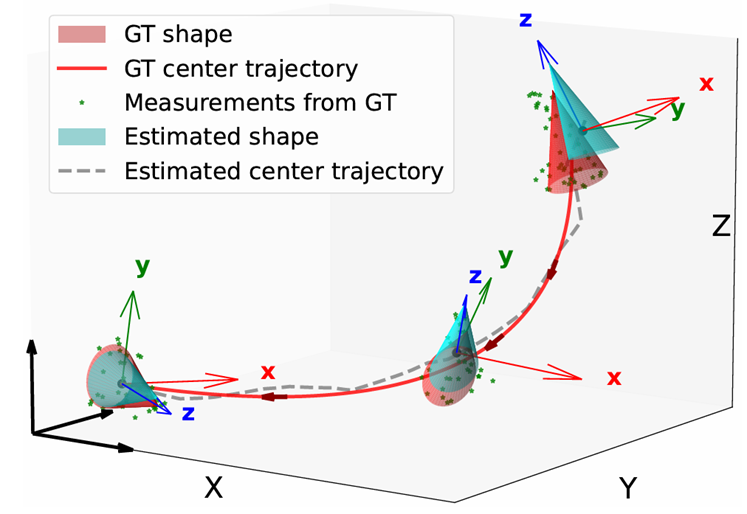
We aim to develop a recursive estimation framework for the simultaneous pose and shape reconstruction of 3D extended objects from point cloud data. While the shape and other kinematic quantities, such as position, naturally reside in a Euclidean vector space, rigid-body rotations evolve on the nonlinear manifold given by the special orthogonal group SO(3).
There are two main classes of approaches for addressing such problems. The first class relies on assuming a particular parametric probability distribution for the state. In this context, uncertain rotations are modelled directly on the manifold rather than by means of local Euclidean approximations. A prominent example is the Matrix Fisher–Gaussian distribution.
The second class of approaches abandons the assumption of a specific parametric probability distribution altogether. Instead, it discretizes the entire state space and performs estimation directly on this discretized representation. Methods of this kind are commonly referred to as grid-based filters.
Aufgaben:
- Literature review on probabilistic models defined on the product manifold of the 3D special orthogonal group and Euclidean space, as well as on grid-based filters and 3D object motion models
- Design of a recursive estimation framework
- Evaluation and comparison of the developed methods
Voraussetzungen:
- Basic knowledge of Python and/or Julia
- Basic knowledge of probability theory, statistics, and machine learning
Literatur:
- Zhou, J., Kruggel-Emden, H. and Hanebeck, U.D., 2025, September. Joint Pose and Shape Estimation of 3D Extended Objects Using Recursive Tangent-Space Bayesian Filtering on SO (3). In 2025 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI) (pp. 1-8). IEEE.
- Wang, W. and Lee, T., 2020, July. Matrix Fisher-Gaussian Distribution on SO (3)× ℝ n for Attitude Estimation with a Gyro Bias. In 2020 American Control Conference (ACC) (pp. 4429-4434). IEEE.
Einleitung:
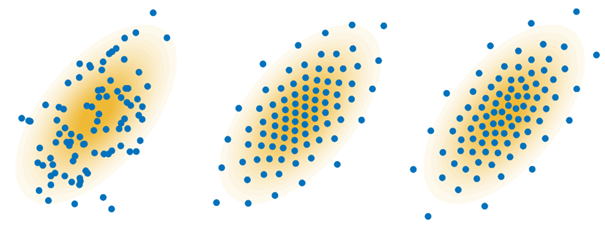
Drawing samples from a probability distribution is an essential task in stochastic information processing and machine learning. An alternative to the commonly used random samples are deterministic samples that are optimally placed to represent the underlying distribution as closely as possible. In many applications they show better convergence rates than random samples.
At ISAS we have developed several algorithms to generate optimally placed deterministic samples for different classes of probability distributions. Parts of these algorithms are suitable to be parallelized and accelerated with GPUs, increasing their applicability to time critical applications. The two main classes of these algorithms at our lab are based on Localized Cumulative Distributions or Projected Cumulative Distributions. Different implementations of the algorithms are already available in Julia, Python, and C++, but only as sequential or thread-parallel versions running on the CPU.
If you have experience in parallel programming, please mention some of the projects you have worked on.
Aufgaben:
- Selection of suitable methods/libraries for GPU-acceleration
- Implementation of selected algorithms for deterministic sampling with GPU-acceleration
- Code optimization with respect to runtime and memory consumption
- Testing, documentation, and packaging of the implemented algorithms
- Comparison with existing CPU implementations of the accelerated algorithms
Voraussetzungen:
- Proficiency in programming with Python, Julia or C++
- Basic knowledge in software engineering and DevOps
- Optional: Experience in parallel programming and GPU programming
Literatur:
- Hanebeck, et al.: Dirac Mixture Approximation of Multivariate Gaussian Densities, 2009
- Hanebeck: Deterministic Sampling of Multivariate Densities based on Projected Cumulative Distributions, 2020

Projekt 8 - Bibliotheken, Bindings und Berechnungen für schnelles Deterministisches Sampling
- Ansprechperson:
Einleitung:
Das ISAS ist international führend in Deterministischem Sampling. Hier werden sehr „glatt“ oder homogen platzierte Samples generiert, welche in den numerischen Anwendungen die eine wesentlich schnellere Konvergenz aufzeigen als die meist verwendeten unabhängigen zufälligen Samples. Der einzige Nachteil ist, dass die Berechnung der deterministischen Samples aufwendiger ist. Zu diesem Zweck wurde eine C++ Library erstellt. Damit diese auch aus höheren Programmiersprachen unkompliziert verwendet werden kann, sollen entsprechende Bindings oder Wrapper erstellt werden. Des weiteren gibt es transformierbare deterministische Samples, die vorab teuer berechnet und danach in unterschiedlichsten Kontexten eingesetzt werden können. Hier sollen entsprechende Samples auf dem BwUniCluster berechnet und bereitgestellt werden.
Aufgaben:
- Einarbeitung in Deterministisches Sampling
- Weiterentwicklung des Julia-Bindings
- Erstellen eines Matlab-Bindings
- Vorab-Berechnung von transformierbaren deterministischen Samples
Voraussetzungen:
- Erfahrung mit einer höheren Programmiersprache
- Interesse an Continuous Integration mit GitHub
Projekt 9 - Auswahl informativer Projektionsrichtungen für projektionsbasierte Distanzmetriken
- Ansprechperson:
Einleitung:
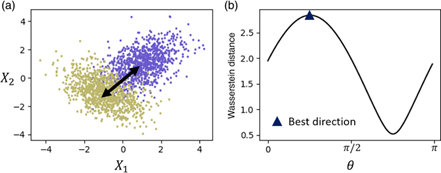
Projektionsbasierte Distanzmetriken spielen eine wichtige Rolle in der Analyse hochdimensionaler Daten. Durch Projektion der Daten auf eindimensionale Unterräume wird die hochdimensionale Distanz durch eine Summe eindimensionaler Distanzen ersetzt, die einfacher zu berechnen sind. Ein Beispiel aus dem maschinellen Lernen ist die Anwendung der „Sliced“ Wasserstein-Distanz als Verlust-Funktion in Neuronalen Netzen [1]. Am ISAS wurde außerdem ein Verfahren zum Sampling von Wahrscheinlichkeitsverteilungen entwickelt, das eine solche Metrik verwendet [2].
Eine zentrale Herausforderung besteht in der Auswahl geeigneter Projektionsrichtungen, die relevante Informationen erhalten und gleichzeitig irrelevante oder redundante Anteile reduzieren. Die gezielte Bestimmung solcher Richtungen ist entscheidend, um mit möglichst wenigen Projektionen genaue Ergebnisse erhalten zu können.
Aufgaben:
- Recherche zu projektionsbasierten Distanz-Metriken und Auswahl informativer Projektionsrichtungen
- Vergleich verschiedener Verfahren im Sampling-Kontext
- Visualisierung des Optimierungsverfahrens
- Untersuchen der Anwendung in hohen Dimensionen
Voraussetzungen:
- Programmierkenntnisse in Julia oder Python
- bevorzugt: Erfahrung mit nichtlinearer Optimierung oder Stochastik
Literatur:
- [1] Zhang et al.: Projection-based techniques for high-dimensional optimal transport problems, 2022
- [2] Hanebeck: Deterministic Sampling of Multivariate Densities based on Projected Cumulative Distributions, 2020
Einleitung:
In sicherheitsrelevanten Bereichen gibt es großen Bedarf an echten Zufallszahlen. Diese lassen sich mit den üblichen deterministischen Computerarchitekturen nicht ohne weiteres generieren, sondern man benötigt dedizierte Hardware, um auf den entsprechenden physikalischen Prozess, etwa das quantenbasierte Schrotrauschen der Zenerdiode, zugreifen zu können. In diesem Praktikum soll hierfür eine möglichst einfach aufgebaute und universell einsetzbare Hardware entwickelt werden. Ein Elektroniker und ein Werkzeugmacher vom ISAS helfen bei der Umsetzung.
Aufgaben:
- Recherche: Digitalisierung von Schrotrauschen
- Aufbau und Test der elektronischen Schaltungen
- Version 1: Datenübertragung an PC über Audio-Eingang
- Version 2: Datenübertragung an PC über USB-Schnittstelle (optional)
- Auswahl und Programmierung eines Mikrocontrollers (optional)
- Zusammen mit unserem Elektroniker: Design und Bestellung einer Platine
Voraussetzungen:
- Interesse an elektronischen Schaltungen
- Interesse an Mikrocontrollern
Literatur:
- Herrero-Collantes 2017, Quantum random number generators
Einleitung:
Die Lokalisierung anhand von Signallaufzeiten elektromagnetischer Signale ist weit verbreitet, etwa in der Multilateration oder bei GNSS wie GPS. Leider kann die exakte Lösung des entsprechenden Least-Squares-Problems nicht in geschlossener Form berechnet werden, sondern es handelt sich um ein nichtlineares Optimierungsproblem nach drei Orts- und einer Zeitvariablen. In diesem Praktikum sollen mit Hilfe eines ublox GNSS Moduls die Rohdaten aller jeweils sichtbaren Satelliten gesammelt werden. Mit Hilfe dieses Datensatzes sollen verschiedene Lösungsalgorithmen verglichen werden, darunter ein neu am ISAS entwickelter, der vor allem bei vielen Messungen gleichzeitig einen Geschwindigkeitsvorteil bietet.
Aufgaben:
- Recherche und Bestellung eines GNSS-Moduls
- Feldversuche mit Aufzeichnung von Datensätzen
- Implementierung und Vergleich gängiger Lösungsalgorithmen
- ggf. Publikation des Datensatzes
Voraussetzungen:
- Erfahrung mit Programmieren
Literatur:
- Daniel Frisch 2025, Why you Shouldn’t Use TDOA for Multilateration