Themengebiete WS21/22
Einleitung:
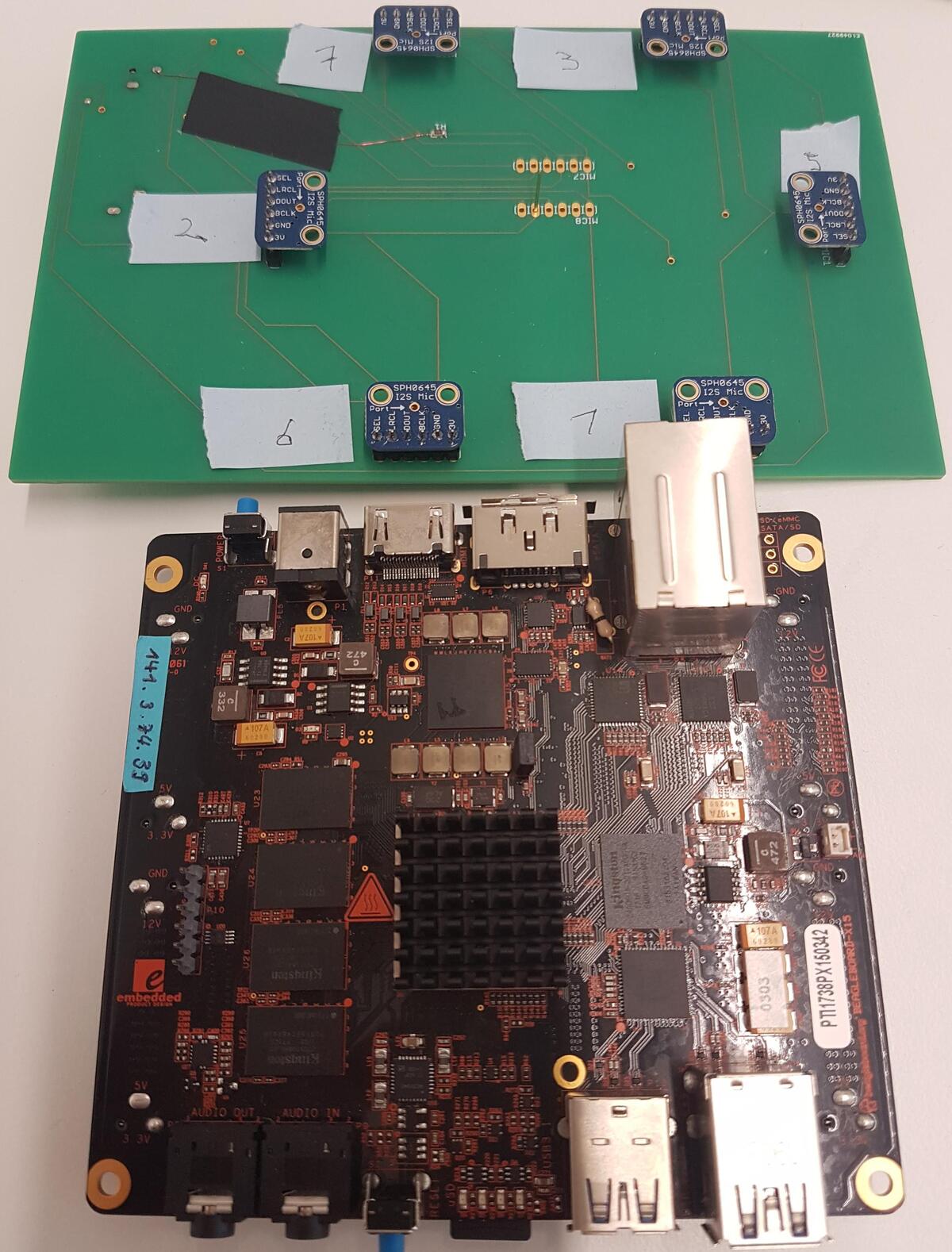
In vergangenen Praktika und Masterarbeiten wurde am Institut ein Sound-Lokalisierungssystem aufgebaut. Dieses besteht aus einem beweglichen Lautsprecher und vier Linux-Beagle-Boards, jeweils mit einem Mikrofon-Array. Der Lautsprecher spielt jede Sekunde ein "Klack"-Geräusch ab, welches später in den Mehrkanal-Sounddateien wieder identifiziert werden kann. Aus den Zeitunterschieden der Signalankunftszeiten und der Schallgeschwindigkeit lässt sich die Position des Lautsprechers errechnen. Aktuell können Mehrkanal-Wavedateien aufgenommen und abgespeichert werden; die „Low-Level-Interna“ sind also bereits erledigt. Die Aufgabe besteht nun darin, die Messung der Signalankunftszeiten in den Audiodateien zu verbessern. Das heißt, Optimierung des abgespielten Geräusches sowie der Peak-Erkennung. Weiterhin gilt es die zeitliche Synchronisation der Sensor-Boards zu verbessern, also Clock-Offset und Drift zu bestimmen und aus den Signalankunftszeiten herauszurechnen.
Aufgaben:
- Weiterentwicklung des Sound-Messsystems
- Synchronisation der Mikrofon-Arrays
- Optimierung des abgespielten "Klack"-Geräuschs
- Lokalisierung mit Least-Squares Optimierung
- Positions-Tracking mit Kalmanfilter
Voraussetzungen:
- Grundkenntnisse in Matlab oder Python
Projekt 2 Map-Enhanced Indoor Localization with Portable Wireless Sensor Networks of Adaptive Topology (wird auf Englisch gehalten!)
- Ansprechperson:
Kailai Li
Introduction:
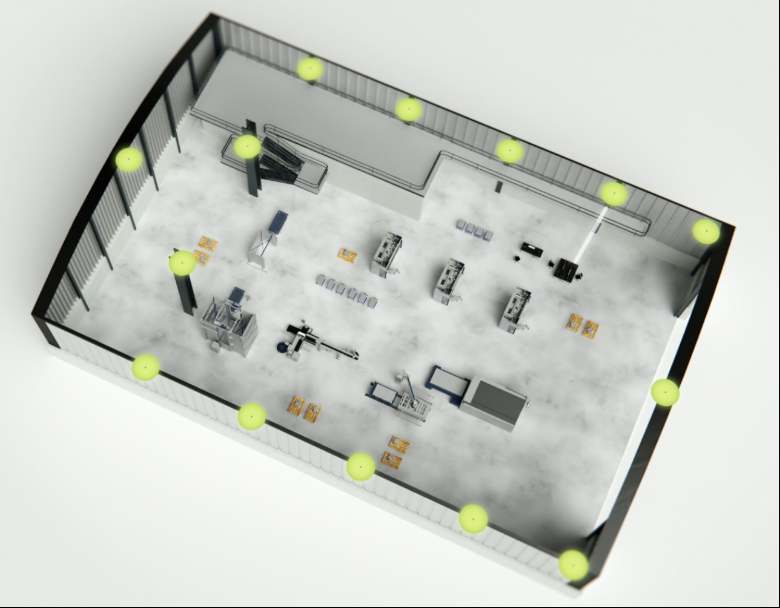
Ultra-wideband (UWB) sensors can provide very accurate range measurements and have been widely deployed in many industrial application scenarios. However, the localization accuracy of UWB sensor networks is heavily dependent on the characteristics of the surroundings, such as complexity of scene geometries, existence of ferromagnetic material as well as anchor positions. Therefore, the network topology plays an important role in the localization performance.
In order to evaluate optimized anchor topologies, a portable solution for UWB localization is to be developed. Given an arbitrary anchor placements, the UWB network is to be constructed for collecting multi-sensor measurements from the tracker, alongside with the HTC Vive system which is responsible for obtaining ground truth data. Based thereon, localization quality given by various anchor topologies can be benchmarked efficiently.
Tasks:
- Familiarization with localization in sensor networks and approaches for mapping-based enhancements
- Establishing the work flow of constructing a portable UWB network of middle to large scales
- Multisensor measurements and ground truth collection using HTC Vive tracking system
- Benchmarking w.r.t. localization accuracy given various anchor topologies
Prerequisites:
- Proficient with coding in C++ and ROS
- Good mathematical skills
- Hardworking
Einleitung:
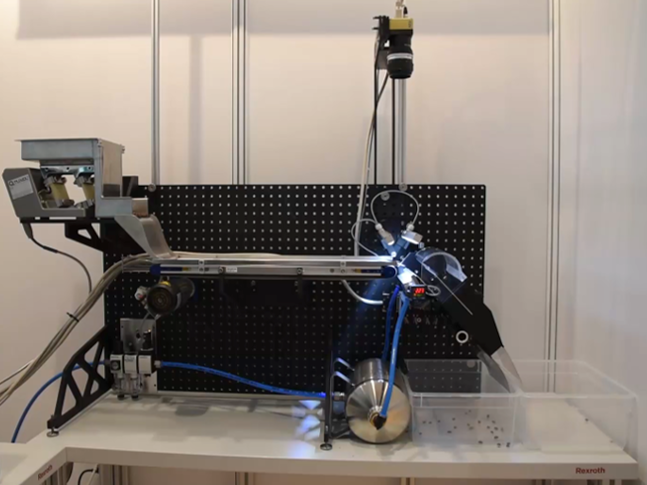
Bei optischen Sortierern werden Schüttgutteilchen auf Basis visueller Eigenschaften getrennt, indem die Teilchen einer Klasse durch gezieltes Öffnen von Druckluftventilen „ausgeblasen“ werden. Um eine akkurate Sortierung zu ermöglichen, werden die Teilchen auf einem Band oder einer Rutsche zunächst mittels einer Bilderkennung detektiert, dann mittels Multitarget-Tracking-Verfahren verfolgt und anschließend die in Bewegungsrichtung liegenden Ventile präzise angesteuert. Um die zur Sortierung benötigten Laufzeiten zu erreichen, wurden bis dato die am ISAS in MATLAB und Python entwickelten Trackingverfahren in einem zweiten Schritt in C++ umgesetzt. Verbesserungen in Hard- und Software lassen aber vermuten, dass eine Sortierung mit ausreichender Laufzeit auch direkt mit dem Python-Entwicklungscode möglich ist, was zukünftige Entwicklungen z. B. im Bereich des Einsatzes lernender Verfahren enorm vereinfachen und beschleunigen würde. In diesem Praktikum soll ein Experimentalsystem bestehend aus einer Partikelrutsche und einer AV-BONITO-PRO-X-1250C-Kamera mit einem auf Python basierenden Tracking ausgestattet und erprobt werden.
Aufgaben:
- Einarbeitung in das bestehende Experimentalsystem und den bestehenden Python-Code zur Bilderkennung und zum Multitarget-Tracking
- Aufbau einer Echtzeit-Pipeline von der Bildakquise bis hin zu Ansteuerung, umfassend:
- Abruf der Kameradaten unter Berücksichtigung der Echtzeitanforderungen und Implementierung der Schnittstelle zu Python
- Anpassung des Python-Codes für den Einsatz in einer Deployment-Umgebung
- Implementierung einer Ansteuerung einer Düsenattrappe
- Laufzeitmessung am Experimentalsystem, Identifikation von Verbesserungspotential und evtl. weitere Reduktion der Laufzeit
Voraussetzungen:
- Gute Kenntnisse in Python
- orkenntnisse in Bildaufnahme und -verarbeitung sowie in Echtzeitanwendungen vorteilhaft
Projekt 4 WLAN-basierte Regelung und Lokalisierung einer omnidirektionalen Roboterplattform
- Ansprechperson:
Einleitung:
Am ISAS wurde ein mobile Roboterplattform entwickelt, welche über vier unabhängige Radeinheiten verfügt, die eine omnidirektionale Bewegung ermöglichen. Damit der Roboter zielgerichtet fahren kann (z.B. einem geg. Pfad folgen oder ein bestimmtes Ziel anfahren), muss er schritthaltend seine Lage (Position + Orientierung) bestimmen und anpassen. Die dazu verwendeten Algorithmen zur Schätzung und Regelung sind typischerweise direkt auf dem Roboter implementiert.
In vorigen Projekten wurde eine alternative Lösung umgesetzt, in welcher ein leistungsstärkerer Computer die Verarbeitung der Sensordaten verarbeit sowie die Sollwerte für die Robotergeschwindigkeit berechnet und diese dann per WLAN an den Roboter übermittelt.
Im Rahmen dieses Praktikums soll die bestehende Lösung in die aktuelle ROS-basierte Software-Architektur integriert und um weiteres Verfahren zur netzwerkbasierten Regelung und Lokalisierung erweitert werden. Im Fokus steht dabei eine verbesserte Berücksichtigung von möglichen Latenzen und Paketverlusten sowie den Auswirkungen von veränderlicher Bandbreite.
Aufgaben:
- Einarbeitung in das existierende System (Hardware und Software)
- Integration der WLAN-Schnittstelle und des bisherigen Codes in die aktuelle Software-Architektur (ROS)
- Implementierung einer einfachen Zeitsynchronisierung mit chrony
- Implementierung eines Verfahrens zur Sequenzbasierten-Regelung über ein Kommunikationsnetzwerk auf Basis eines sog. Multiple-Model-Ansatzes
- Evaluation unter verschiedenen Netzwerkbedingungen mit verschiedenen Trajektorien wie Kreis oder Quadrat
Voraussetzungen:
- Erfahrungen mit ROS und Gazebo sowie C++
- Interesse an Robotik
- Vorkenntnisse in Regelungstechnik sowie Signalverarbeitung und Lokaliserungsverfahren
Einleitung:
Damit Roboter fern abseits von Fließbändern in Alltagsumgebungen Aufgaben erledigen können, ist ein Verständnis der Umwelt unerlässlich. Insbesondere muss der Roboter die Form von Objekten approximativ beschreiben können, ohne dabei zu große Annahmen über die Objektformen treffen zu müssen. In diesem Praktikum soll ein neuartiges Verfahren aus der Literatur zum Verfolgen (Tracken) von ausgedehnten Objekten auf Objekte in realen Umgebungen angewandt werden. Das Verfahren basiert auf Spherical Harmonics und kann zur Beschreibung von Objekten verwendet werden, die sternkonvex sind, also von einem bestimmten Punkt alle anderen Punkte des Objekts erreichbar sind. Eine Implementierung des Trackers ist in Matlab verfügbar. In dem Praktikum soll in einer geeigneten Sprache ein entsprechendes Model für das Framework von ARMAR 6 erstellt werden.
Aufgaben:
- Einarbeitung in den den Tracker basierend auf Spherical Harmonics und den dazuhörigen Matlab-Code
- Umsetzung des Trackers in einer passenden Sprache (C++ oder Python)
- Umsetzung geeigneter Schnittstellen für die Ein- und Ausgabe
- Anwendung auf Realdaten und Visualisierung der Ergebnisse
Voraussetzungen:
- Solide Programmiererfahrung in Python oder C++
- Begeisterung für Themen in der künstlichen Intelligenz
- Kenntnisse zur Visualisierung von Objekten sind von Vorteil
Einleitung:
Derzeit wird am ISAS eine verbesserte Version der bereits existierenden raumgroßen haptischen Schnittstelle entwickelt. Dabei handelt es sich um eine Vorrichtung die für weiträumige Teleoperation in Kombination mit Methoden der Virtuellen Realität (VR) eingesetzt werden kann.
Da es sich bei der haptischen Schnittstelle um einen sehr großen Roboter handelt, der direkt mit einem Menschen interagiert, ist aus Sicherheitsgründen eine zuverlässige Anwesenheitsdetektion des Nutzers notwendig. In der Vergangenheit wurden hierfür mechanische Schalter verwendet, die direkt im Griff des Benutzers eingelassen sind. Diese haben jedoch den Nachteil, dass Nutzer sich erst damit vertraut machen müssen und dass nur bestimmte Handposen möglich.
Daher soll der Einsatz kapazitiver Sensorik zur Anwesenheitsdetektion untersucht werden. Hierfür können vorgefertigte ICs, wie beispielsweise der MPR121 oder der 223B, eingesetzt werden. Die entwickelte Lösung soll direkt in den Handgriff integrierbar sein und muss dementsprechend kompakt und robust gegenüber äußeren Einflüssen sein.
Aufgaben:
- Einarbeitung in kapazitive Berührungssensoren
- Auswahl geeigneter Messtechnik
- Evaluation der Empfindlichkeit und Zuverlässigkeit in verschiedenen Betriebssituationen
- Entwicklung eines funktionierenden Prototypen
Voraussetzungen:
- Erfahrungen im Umgang mit C++ und Embedded Systems
- Begeisterung an der Arbeit mit Hardware
- Erfahrungen im PCB-Design von Vorteil

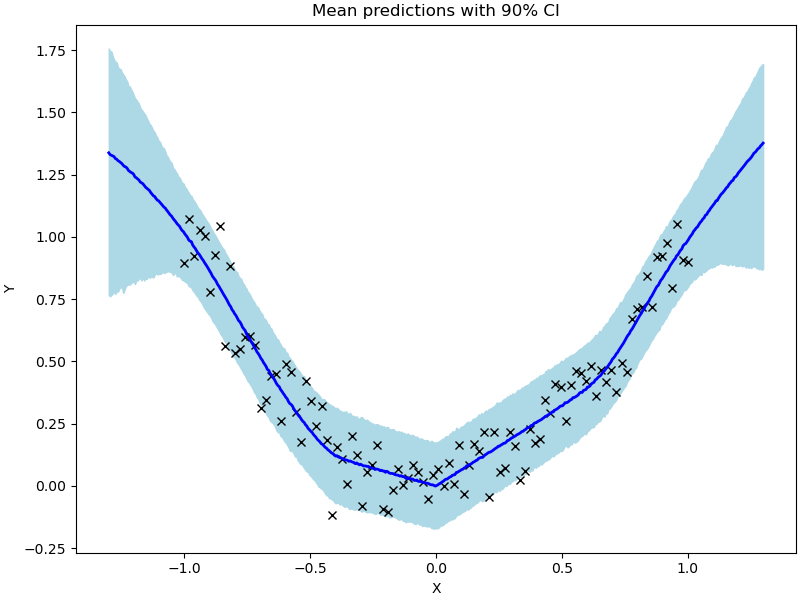
Einleitung:
In diesem Praktikum sollen Regressionsprobleme betrachtet werden. Ein Beispiel hierfür ist die Schätzung von Behandlungseffekten in der Medizin. Für Datensätze wie IHPD 1000 sollen Modelle mithilfe von NumPyro entwickelt und gegen den State of the Art (wie dieses Paper für IHPD 1000) verglichen werden
Aufgaben:
- Einarbeitung in BNNs mit NumPyro
- Analyse des Datensatzes
- Aufbauen eines Modells, das sowohl Unterschiede als auch Ähnlichkeiten der betrachteten Krankheiten berücksichtigt
Voraussetzungen:
- Interesse an und Grundkenntnisse zur Modellierung unsicherheitsbehafteter Phänomene, beispielsweise durch unserer Vorlesung Stochastische Informationsverarbeitung
- Programmiererfahrung in Python
- Kenntnisse zu neuronalen Netzen