

Themengebiete SS21
Einleitung:
Verschleißteile in Maschinen werden meistens entweder in regelmäßigen Intervallen ausgetauscht oder aber erst nachdem sie versagen. Eine dritte, wesentlich effizientere Möglichkeit ist es, den Zustand kontinuierlich sensorbasiert zu überwachen und genau dann einzugreifen, wenn sich ein baldiges Versagen ankündigt.
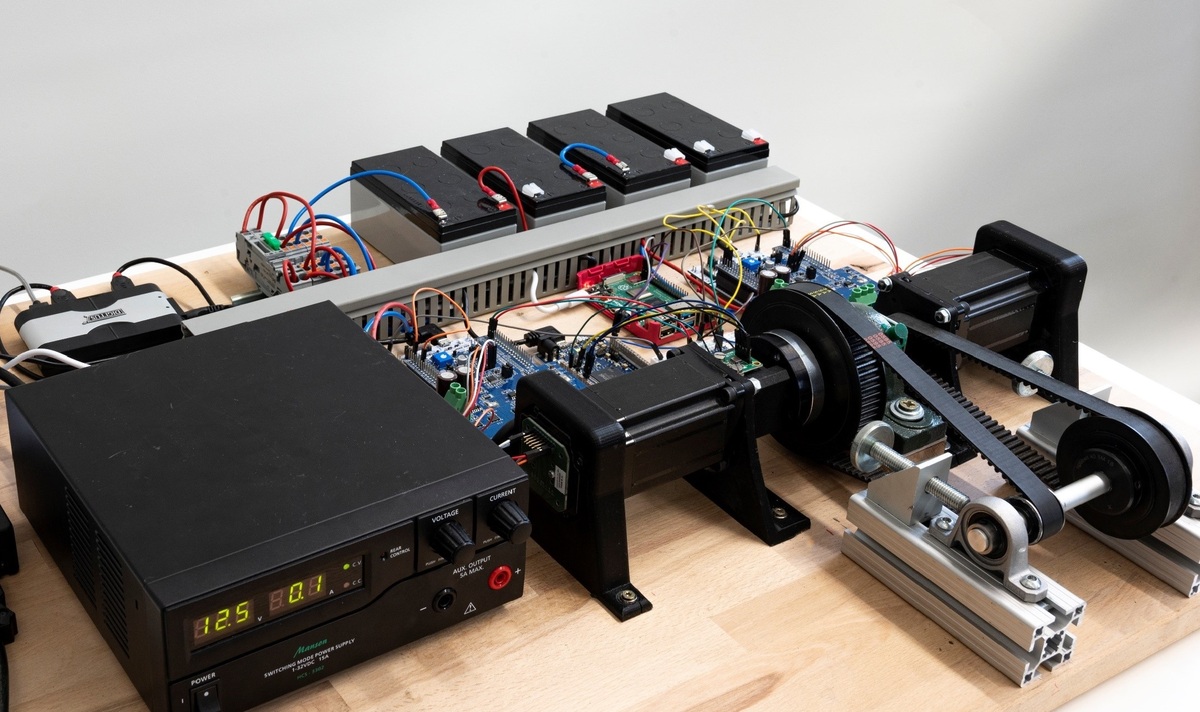
Dazu haben wir am ISAS einen Teststand aufgebaut, in dem ein Wellgetriebe an beiden Seiten mit Elektromotoren verbunden ist, sodass wir das Getriebe mit beliebigen Drehzahl-Drehmoment-Trajektorien beanspruchen können, die realen Bedingungen (z.B. einem Einsatz im Roboter-Greifarm) nachempfunden sind. Ein zusätzlich montierter Vibrationssensor liefert die nötigen Daten zum Zustands-Monitoring des Getriebes.
In Zusammenarbeit mit Zeiss, endiio und Knowtion entwickeln wir effiziente Machine Learning Verfahren, mit denen sich die verbleibende Lebensdauer anhand der Vibrationsdaten abschätzen lässt.
Aufgaben:
- Aufzeichnung von Realdaten mit dem vorhandenen Teststand
- Implementierung verschiedener Machine Learning Verfahren zur Einschätzung des Getriebe-Zustands
- Vergleich der Verfahren und wissenschaftliche Diskussion
Voraussetzungen:
- Grundkenntnisse Matlab
- Grundkenntnisse Machine Learning
- Grundkenntnisse Linux Kommandozeile
Projekt 2 - Orientierungsschätzung für symmetrische Objekte mittels neuronaler Netze
- Ansprechperson:
Einleitung:
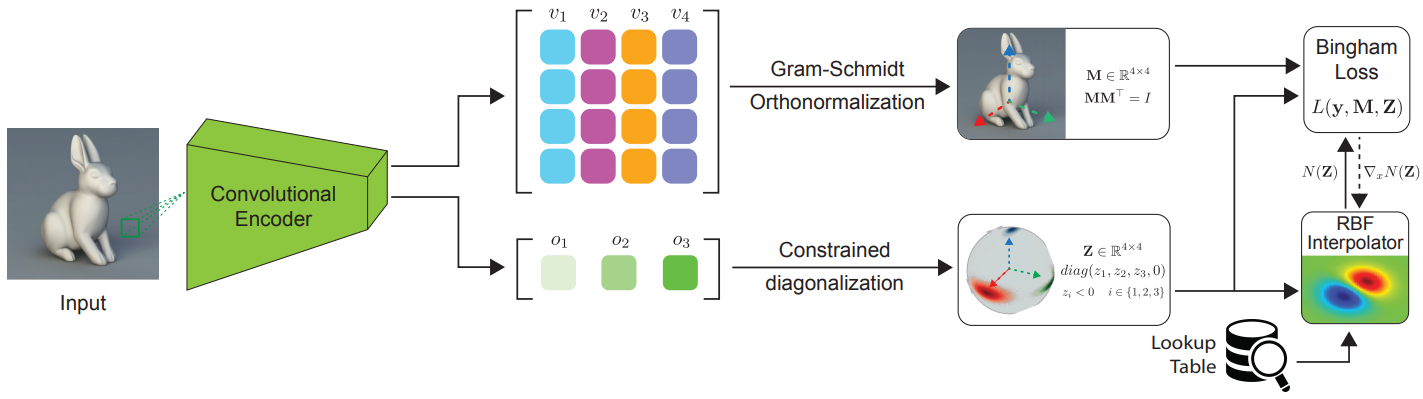
Die Schätzung der Lage von Objekten im Raum ist ein allgegenwärtiges Problem in der Robotik und anderen Feldern der künstlichen Intelligenz. Mit steigender Rechenleistung und dem Fortschritt der Erkenntnisse im Feld der neuronalen Netze sind diese für viele Aufgaben der Bildverarbeitung zum Standard geworden. In diesem Projekt sollen neuronale Netze verwandt werden, um mögliche Orientierungen aus Bilddaten von Objekten mit Symmetrien abzuleiten. Auch sollen dabei Unsicherheiten ausgegeben werden. Diese ermöglichen es, Informationen über einen zeitlichen Verlauf sinnvoll zu fusionieren.
Aufgaben:
- Analyse möglicher Architekturen, die sich inhärent zur Ausgabe mehrerer Orientierungen eigenen
- Iteratives Erstellen und Erproben von Netzen, die die Orientierungen mit hilfreichen Informationen zur Unsicherheit ausgeben
- Evaluation auf realen Datensätzen (bspw. T-LESS Datensatz und andere öffentliche Datensätze)
Voraussetzungen:
- Praktische Erfahrung mit dem Training neuronaler Netze mit TensorFlow oder PyTorch (bevorzugt)
- Begeisterung an der Einarbeitung in oder Erfahrung mit RNNs und anderen weiterführenden Architekturen
- Grundlagen der Stochastik (bspw. Gaußverteilung)
Einleitung:
Im Zuge des ROBDEKON-Projekts wurde am Fraunhofer IOSB ein 24-Tonnen-Bagger angeschafft und so umgerüstet, dass eine vollständige Steuerung über einen Rechner mit ROS möglich ist. Dies wird unter anderem genutzt, um den Bagger möglichst autonom Arbeiten zu lassen oder um innovative Konzepte für die Fernsteuerung (Teleoperation) zu erproben.
In beiden Fällen ist die Kenntnis der auftretenden Kräfte an der Schaufel des Baggers von großen Interesse, da so zusätzliches Feedback für die Algorithmen oder den menschlichen Operator, der beispielsweise ein VR-Headset und ein Force-Feedback-Joystick verwendet, zur Verfügung steht. Allerdings können diese Kräfte aufgrund fehlender Sensorik nicht direkt gemessen werden. Ziel dieses Praktikums ist daher die Schätzung der Endeffektorkräfte basierend auf den als Messung verfügbaren Hydraulikdrücken an den Zylindern.
Aufgaben:
- Entwurf eines einfachen Baggermodells
- Implementierung einer Parameterschätzung
- Entwurf und Implementierung einer Kraftschätzung
- Validierung mit Realdaten
- optional: Test auf Zielhardware des IOSB
Voraussetzungen:
- Grundkenntnisse in Matlab
- Vorkenntnisse im Bereich Schätzverfahren (Kalman-Filter, Least-Squares-Verfahren)
- Ausgeprägtes Interesse an Robotik
Projekt 4 - Self-Supervised Learning für rekurrente neuronale Netze und Kalman-Filter in der Schüttgutsortierung
- Ansprechperson:
Einleitung:
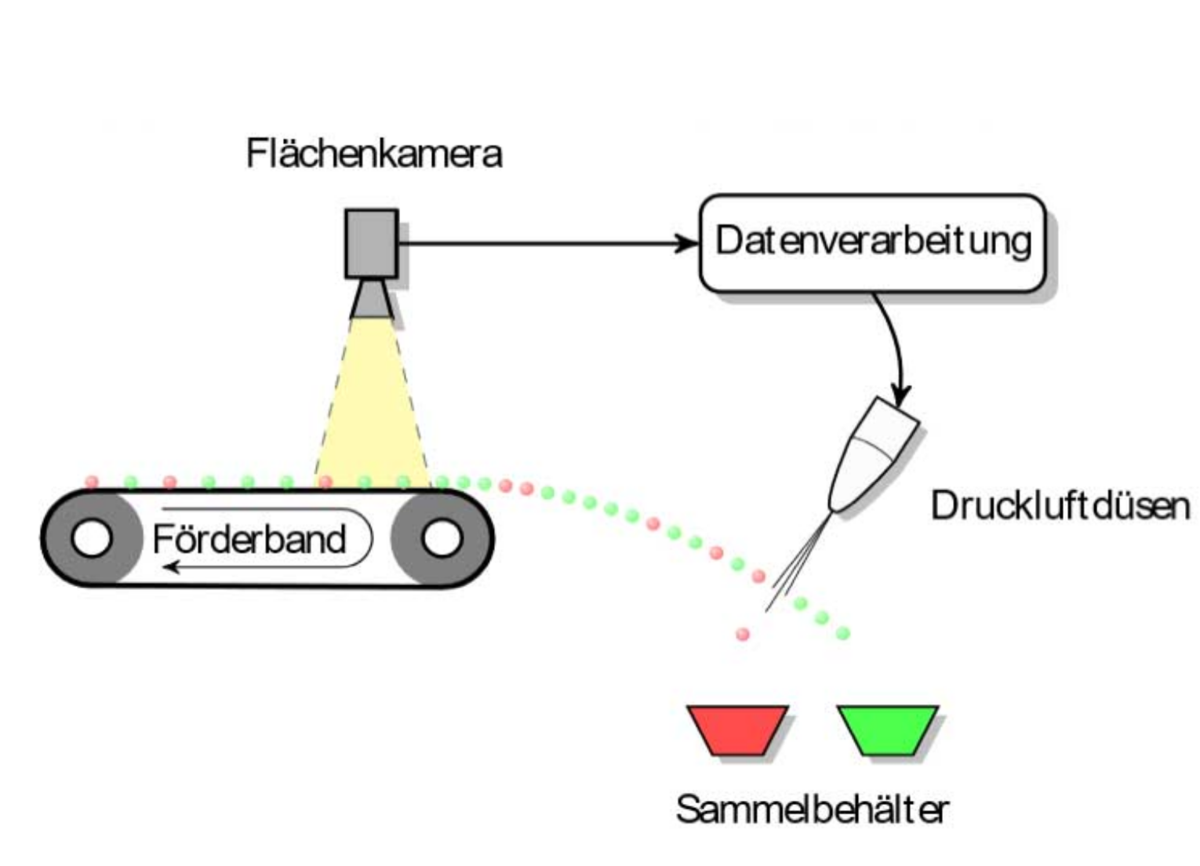
Bei optischen Bandsortierern werden Schüttgutteilchen auf Basis visueller Eigenschaften getrennt, indem die Teilchen einer Klasse durch gezieltes Öffnen von Druckluftventilen „ausgeblasen“ werden. Um eine akkurate Sortierung zu ermöglichen, werden die Teilchen auf dem Band zunächst mittels Multitarget-Tracking-Verfahren verfolgt. Dazu werden mittels physikalischer Bewegungsmodelle oder rekurrenter neuronaler Netze Prädiktionen erstellt und diese anschließend mit den neuen Messungen fusioniert. Hierbei ist ein Zuordnungsproblem zwischen den Prädiktionen und den neuen Messungen zu lösen, da a priori nicht bekannt ist, welche Messungen zu welchen Partikeln gehören. Nach Abschluss des Trackings werden die gewonnenen Bewegungsinformationen genutzt, um wiederum mittels Bewegungsmodellen oder RNNs Zeitpunkt und Position der Teilchen am Düsenbalken vorherzusagen.
Die Genauigkeit der Prädiktionsverfahren hängt maßgeblich von der Ähnlichkeit der aktuellen Situation zum Modell bzw. zum Trainingsdatensatz ab, während die Güte der Zuordnung u. a. von der Belegung des Bandes beeinflusst wird. Da sich im Realbetrieb die Eigenschaften des Schüttgutstroms ändern können, sollen die bestehenden Verfahren in diesem Praktikum so umgestaltet werden, dass sie adaptiv hierauf reagieren können.
Aufgaben:
- Einarbeitung in das bestehende System zum Multitarget-Tracking und zur Prädiktion zum Düsenbalken.
- Integration eines Verfahrens zum Self-Supervised Learning für daten- und modellbasierte Prädiktionsverfahren in die bestehende Implementierung zum Schüttguttracking und zur Prädiktion zum Düsenbalken.
- Entwicklung und Implementierung einer Methode zur laufenden Anpassung der Parameter der Zuordnung aus Monitoring geeigneter Kenngrößen des Schüttgutstroms.
- Einstellen der Parameter der Verfahren (z. B. Learning Rate) unter Berücksichtigung des Trade-offs zwischen schneller Anpassungsfähigkeit und Overfitting.
- Untersuchung der Anpassungsfähigkeit anhand von Simulations- und Realdaten.
Voraussetzungen:
- Grundkenntnisse über neuronale Netze und Kalman-Filter
- Grundkenntnisse in Python und idealerweise in Tensorflow
- Durchführung als reines Online-Praktikum möglich
Projekt 5 - WLAN-basierte Regelung und Lokalisierung einer omnidirektionalen Roboterplattform
- Ansprechperson:
Florian Rosenthal
Einleitung:
Am ISAS wurde ein mobile Roboterplattform entwickelt, welche über vier unabhängige Radeinheiten verfügt, die eine omnidirektionale Bewegung ermöglichen. Damit der Roboter zielgerichtet fahren kann (z.B. einem geg. Pfad folgen oder ein bestimmtes Ziel anfahren), muss er schritthaltend seine Lage (Position + Orientierung) bestimmen und anpassen. Die dazu verwendeten Algorithmen zur Schätzung und Regelung sind typischerweise direkt auf dem Roboter implementiert.
In einem vorherigen Praktikum wurde eine alternative Lösung umgesetzt, in welcher ein leistungsstärkerer Computer die Verarbeitung der Sensordaten verarbeit sowie die Sollwerte für die Robotergeschwindigkeit berechnet und diese dann per WLAN an den Roboter übermittelt.
Im Rahmen dieses Praktikums soll die bestehende Lösung in die aktuelle ROS-basierte Software-Architektur integriert und um weitere Verfahren zur netzwerkbasierten Regelung und Lokalisierung erweitert werden. Im Fokus steht dabei eine verbesserte Berücksichtigung von möglichen Latenzen und Paketverlusten sowie den Auswirkungen von veränderlicher Bandbreite.
Aufgaben:
- Einarbeitung in das existierende System (Hardware und Software)
- Integration der WLAN-Schnittstelle und der bisherigen verfahren in die aktuelle Software-Architektur
- Implementierung eines verbesserten Verfahrens zur Regelung über ein Kommunikationsnetzwerk
- Evaluation unter verschiedenen Netzwerkbedingungen mit verschiedenen Trajektorien wie Kreis oder Quadrat
Voraussetzungen:
- Grundkenntnisse in ROS und Gazebo
- Interesse an Robotik
- Vorkenntnisse in Regelungstechnik sowie Signalverarbeitung und Lokaliserungsverfahren
zurück zur Praktikumsseite SS21 oder direkt zur Anmeldung