Themengebiete WS20/21
| Projekt | Thema | Ansprechpartner |
|---|---|---|
| 1 | Entwicklung einer Regelung für eine Sortierung mit Rückführung | Dr.-Ing. Florian Pfaff, Marcel Reith-Braun |
| 2 | Adaptive Schüttgutsortierung mit Methoden des Self-Supervised Learnings | Marcel Reith-Braun, Dr.-Ing. Florian Pfaff |
| 3 |
Entwurf eines echtzeitfähigen Regelungs- und Signalverarbeitungsframework |
Michael Fennel |
| 4 | Map-Adaptive Indoor Localization Based on Machine Learning * | Kailai Li |
| 5 | Encrypted Distributed Estimation on Embedded Hardware * | Christopher Funk, Marko Ristic |
| 6 | Positions- und Drehzahlschätzung mit mehreren Sensoren in Echtzeitsystemen | Daniel Frisch, Jana Mayer, Ajit Basarur |
Einleitung:
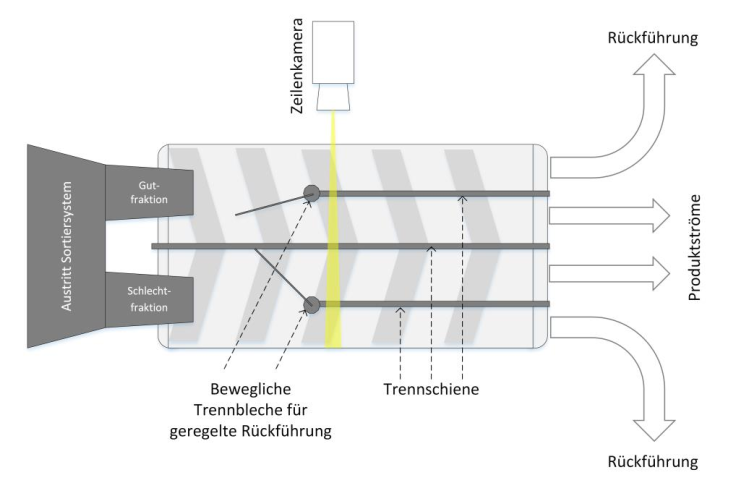
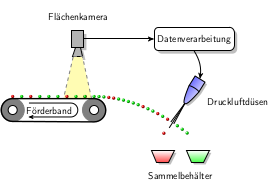
Bei optischen Bandsortierern werden Teilchen wie Recyclingmaterial oder Lebensmittel auf Basis visueller Eigenschaften getrennt, indem die Teilchen einer Klasse durch gezieltes Öffnen von Druckluftventilen „ausgeblasen“ werden. Hierzu werden die Teilchen mittels einer Kamera detektiert und hierauf aufbauend mittels Bewegungsmodellen Zeitpunkt und Position der Teilchen am Düsenbalken vorhergesagt. Das Sortierergebnis hängt hierbei stark von sich im Realbetrieb dynamisch ändernden Faktoren wie dem Massenstrom, der Bandbelegung sowie den Eigenschaften und dem Mischungsverhältnis der zu trennenden Materialien ab.
Im Rahmen dieses Praktikums soll simulativ untersucht werden, wie sich das Sortierergebnis durch Rückführung eines Teils des sortierten Materials vom Ausgang zum Eingang des Sortierers stabilisieren lässt. Dem liegt die Idee zugrunde, den Sortierer auch bei sich dynamisch ändernden Bedingungen möglichst nahe seines Bestpunktes betreiben zu können. Ziel ist es, eine Regelung zu entwerfen, die den rückführbarem Anteil so einstellt, dass das Sortierergebnis dauerhaft eine möglichst hohe Güte aufweist. Hierzu soll zunächst ein einfaches Simulationsmodell, welches die wesentlichen Eigenschaften des Sortierers und der Rückführung approximativ abbildet, aufgebaut werden. Basierend auf diesem Modell sollen anschließend geeignete Regler identifiziert und eingestellt werden.
Aufgaben:
- Entwurf eines einfachen Simulationsmodells für Sortierer und Rückführung
- Einstellung der Parameter des Simulationsmodells durch Abgleich mit einem realen System
- Recherche nach geeigneten Reglern und Implementierung dieser
- Simulation des geschlossenen Regelkreises und Evaluation der Verfahren
Voraussetzungen:
- Grundkenntnisse in Matlab und/oder Python
- Grundkenntnisse in Regelungstechnik
Einleitung:
Bei optischen Bandsortierern werden Schüttgutteilchen auf Basis visueller Eigenschaften getrennt, indem die Teilchen einer Klasse durch gezieltes Öffnen von Druckluftventilen „ausgeblasen“ werden. Um eine akkurate Sortierung zu ermöglichen, werden die Teilchen auf dem Band zunächst mittels Multitarget-Tracking-Verfahren verfolgt. Dazu werden mittels physikalischer Bewegungsmodelle oder rekurrenter neuronaler Netze Prädiktionen erstellt und diese anschließend mit den neuen Messungen fusioniert. Hierbei ist ein Zuordnungsproblem zwischen den Prädiktionen und den neuen Messungen zu lösen, da a priori nicht bekannt ist, welche Messungen zu welchen Partikeln gehören. Nach Abschluss des Trackings werden die gewonnenen Bewegungsinformationen genutzt, um wiederum mittels Bewegungsmodellen oder RNNs Zeitpunkt und Position der Teilchen am Düsenbalken vorherzusagen.
Die Genauigkeit der Prädiktionsverfahren hängt maßgeblich von der Ähnlichkeit der aktuellen Situation zum Modell bzw. zum Trainingsdatensatz ab, während die Güte der Zuordnung u. a. von der Belegung des Bandes beeinflusst wird. Da sich im Realbetrieb die Eigenschaften des Schüttgutstroms ändern können, sollen die bestehenden Verfahren in diesem Praktikum so umgestaltet werden, dass sie adaptiv hierauf reagieren können.
Aufgaben:
- Einarbeitung in das bestehende System zum Multitarget-Tracking und zur Prädiktion zum Düsenbalken
- Integration eines Verfahrens zum Self-Supervised Learning für daten- und modellbasierte Prädiktionsverfahren in die bestehende Implementierung zum Schüttguttracking und zur Prädiktion zum Düsenbalken
- Entwicklung und Implementierung einer Methode zur laufenden Anpassung der Parameter der Zuordnung aus Monitoring geeigneter Kenngrößen des Schüttgutstroms
- Einstellen der Parameter der Verfahren (z. B. Learning Rate) unter Berücksichtigung des Trade-offs zwischen schneller Anpassungsfähigkeit und Overfitting
- Untersuchung der Anpassungsfähigkeit anhand von Simulations- und Realdaten
Voraussetzungen:
- Grundkenntnisse über neuronale Netze und Kalman-Filter
- Grundkenntnisse in Python und idealerweise in Tensorflow
Projekt 3 - Entwurf eines echtzeitfähigen Regelungs- und Signalverarbeitungsframework
- Ansprechperson:
Einleitung:
Am ISAS existiert bereits eine haptische Benutzerschnittstelle, die für weiträumige Teleoperation in Kombination mit Methoden der Virtuellen Realität (VR) eingesetzt werden kann. Um einen modularen und langfristigen Betrieb dieser haptischen Schnittstelle zu ermöglichen, sollen Regelung und Steuerung der Anlage von prototypischer Hardware hin zu Standardhardware umgerüstet werden.
Um dies zu bewerkstelligen wurde bereits ein Standard-Linux-Rechner mit RT-Preempt-Kernelerweiterung vorbereitet, welcher in der Lage ist, mit dem industriellen Feldbus der Roboter-Hardware zu kommunizieren. Dies soll eine Regelung mit 1 kHz ermöglichen.
Um eine möglichst große Flexibilität bei gleichzeitiger Wiederverwertbarkeit von Code zu erhalten, sollen daher im Rahmen dieses Praktikums Möglichkeiten untersucht werden, ein echtzeitfähiges Regelungs- und Signalverarbeitungsframework unter Linux aufzusetzen. Da für die übergeordneten Algorithmen Robot Operating System (ROS) zum Einsatz kommt, sind außerdem echtzeitfähige Bridging-Funktionalitäten zu untersuchen.
Aufgaben:
- Recherche und Auswahl geeigneter Echtzeitframeworks
- Implementierung einer beispielhaften, modularen Regelungsarchitektur mit ROS-Anbindung
- Evaluation der Echtzeitperformance
- Optional: Demonstration mithilfe einer einfachen Regelungsaufgabe
Voraussetzungen:
- Kenntnisse in C++
- Interesse an Robotik
- Idealerweise: Linux- und ROS-Kenntnisse

Projekt 4 - Map-Adaptive Indoor Localization Based on Machine Learning (wird auf Englisch gehalten!)
- Ansprechperson:
Kailai Li
Introduction:
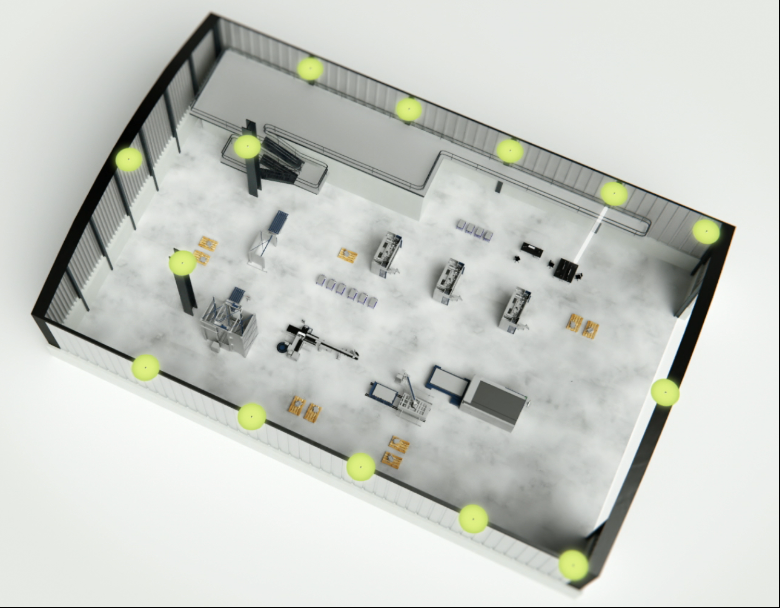
Ultra-wideband (UWB) sensors can provide localization accuracy up to the level of decimeter and are widely deployed in many industrial application scenarios. However, the actual localization performance of UWB sensor network depends heavily on the charateristics of the surrounding, e.g., complexity of map geometry, existence of ferromagnetic material as well as sensor node locations.
In this project, a novel map-adaptive deployment solution for UWB sensor network is to be developed. Map information is to be considered as preknowledge to align the sensor locations in an optimal way, such that a guaranteed localization accuracy can be obtained. More specifically, the project is divided into the following work packages.
Tasks:
- Implementation of a localizaton system for UWB sensor networks given high-resolution 3D map
- Devlopment of learning-based algorithm for optimal alignment of sensor nodes
- Evaluation for localization accuracy based on experiment
Prerequisites:
- Very solid programming skill of C++/Python, CMake and hands-on experience with deep learning framework
- Good knowledge of computer graphics and GPU programing experience are preferred
- Very strong motivation and commitment to research
Projekt 5 - Encrypted Distributed Estimation on Embedded Hardware (wird auf Englisch gehalten!)
- Ansprechperson:
Christopher Funk, Marko Ristic
Introduction:
Wireless sensor networks (WSNs) are ubiquitous. They may be found, for instance, in smart homes or biomedical applications. WSNs consist of multiple autonomous, intelligent sensor nodes that record sensor data locally and process it in cooperation with other, sometimes untrusted, sensor nodes. With the rise of such cooperative sensor networks and cloud processing, the need for privacy between participating parties has become increasingly apparent.
Novel methods for distributed estimation make use of encryption schemes providing mathematical operations on ciphertexts to preserve participants' privacy. The implementation of these schemes on low-power, embedded devices is often complicated by their computational requirements, but is an important step in their adoption and application.
Tasks:
- Implement networking component on wireless sensor nodes
- Implement Paillier encryption scheme on sensor nodes
- Optional: Other encryptions schemes, secure distributed estimation
- Demonstration of achieved results
Prerequisites:
- Programming experience in C/C++
- Interest in bare-metal software development and cryptographic implementation
- Experience with embedded devices may be beneficial
Projekt 6 - Positions- und Drehzahlschätzung mit mehreren Sensoren in Echtzeitsystemen
- Ansprechperson:
Daniel Frisch, Jana Mayer, Ajit Basarur
Einleitung:
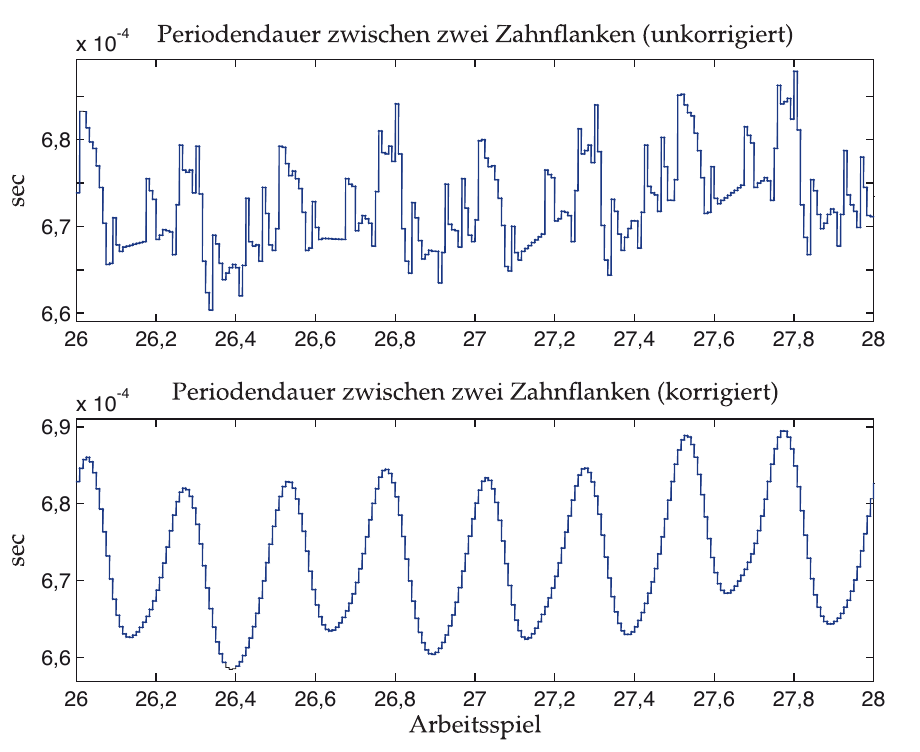
Eine hochgenaue Positions- und Drehzahlschätzung ist bei vielen mechanischen Geräten und insbesondere auch Fahrzeugen und Robotern von größter Bedeutung für die Positionsregelung bzw. Motorsteuerung. Stand der Technik sind hier vor allem optische Drehgeber, die mit einer Art Zahnrad und einer Lichtschranke arbeiten. Kostengünstigere Alternativen können mit Magnetfeld-, Drehraten- und Beschleunigungssensoren realisiert werden. Beim Magnetfeldsensor muss – ähnlich wie bei einem Fahrradtacho – ein kleiner Magnet auf der Motorwelle angebracht werden. Inertialsensoren könnten dagegen komplett "nichtinvasiv" angebracht werden, und eine Positionsschätzung rein anhand derer ist daher ein sehr attraktiver neuartiger Ansatz.
In diesem Praktikum soll ein optischer Drehgeber als Referenz verwendet werden und darauf aufbauend eine Positions- und Drehratenschätzung anhand gängiger Inertialsensorik entwickelt und evaluiert werden. Damit die Referenzwerte möglichst exakt bestimmbar sind, soll die Genauigkeit des optischen Encoders durch Modellierung des Zahnflankenfehlers verbessert werden. Um die Motorsteuerung und verschiedene Sensoren gut synchronisieren zu können, soll das Robot Operating System (ROS 2.0) auf einem Raspberry Pi und damit verbundenen Arduinos verwendet werden.
Aufgaben:
- Aufbau eines Messsystems mit Raspberry Pi und Arduinos auf ROS 2.0 – Basis für verschiedene Sensoren
- Modellierung des Zahnflankenfehlers im optischen Encoder, um das Maximum an Genauigkeit zu erhalten
- Inspektion der Magnetfeld-, Drehraten- und Beschleunigungs-Messdaten
- Positionsschätzung anhand IMU-Daten realisieren
- Evaluation
Voraussetzungen:
- Grundkenntnisse in Python oder Matlab
- bevorzugt: Erfahrung mit ROS